|

|

|
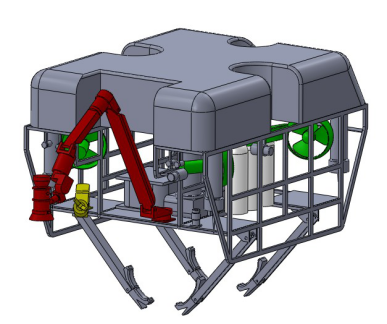
| 水下焊接机器人示意图 | 水下焊枪 | 水下焊接实验 |

基于ROV的水下焊接机器人原理样机的设计,工作水深0-300米,用于海洋结构物、海底管道的检测、焊接和维修等。
技术指标
1.打捞救助水下焊割机器人系统
适合高海况和大深度条件下,打捞救助水下焊割机器人装备,设计水深500m,工作温度-10~40℃,具备水下快速焊割、水下摄像、水下定向定速运动等能力。
2.水下信号传输和控制技术
实现水下焊割机器人与地面工作站之间的远距离信号传输与控制,实现信息的真实、有效传递,误差在1%以内;水下检测设备能够清晰观测到水下焊割作业过程,便于实时进行作业过程控制。
 地址:哈尔滨市南岗区南通大街258号船舶大厦14楼
地址:哈尔滨市南岗区南通大街258号船舶大厦14楼 座机:0451-82511035
座机:0451-82511035